
In this section we investigate different methods for solving for the roots (i.e. zeros) of a nonlinear equations with a single independent variable.
The bisection method, sometimes called the binary search method, is a simple method for finding the root, or zero, of a nonlinear equation with one unknown variable. (If the equation is linear, we can solve for the root algebraically.)
If we suppose $f$ is a continuous function defined on the interval $[a,b]$, with $f(a)$ and $f(b)$ of opposite sign (e.g., they appear on opposite sides of the root). There exists a point $p$ within the interval $[a,b]$ with $f(p) = 0$. We start the iteration by choosing a point halfway between $a$ and $b$ and checking the sign of $f(p)$. It will either have the same sign as $f(a)$ or $f(b)$. If the sign of $f(p)$ is the same as $f(a)$. Then $p$ gets set to $a$ and the process is repeated. If the sign of $f(p)$ is the same as $f(b)$, then $p$ gets set to $b$ and the process is repeated.
An animation showing the root of the function $f(x) = cos(x) - x^3$ converging to a tolerance of $0.1$ follows:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
import matplotlib
matplotlib.rc("animation", html="jshtml")
a = [0.2]
b = [1.3]
p = []
f = lambda x: np.cos(x) - x ** 3 if x is not None else None
FA = f(a[-1])
for i in range(20):
p.append(None)
a.append(a[-1])
b.append(b[-1])
p.append(a[-1] + (b[-1] - a[-1]) / 2)
FP = f(p[-1])
if np.isclose(FP, 0.0) or (b[-1] - a[-1]) / 2 < 0.10:
break
if np.sign(FA) * np.sign(FP) > 0:
a.append(p[-1])
b.append(b[-1])
FA = FP
else:
a.append(a[-1])
b.append(p[-1])
count = 0
subcount = 0
a_label = []
b_label = []
p_label = []
for _ in range(len(a)):
a_label.append(r"$a_{}$".format(count))
b_label.append(r"$b_{}$".format(count))
p_label.append(r"$p_{}$".format(count))
subcount += 1
if subcount == 2:
subcount = 0
count += 1
fig, ax = plt.subplots(figsize=(8, 6))
# set the x-spine (see below for more info on `set_position`)
ax.spines["left"].set_position("zero")
# turn off the right spine/ticks
ax.spines["right"].set_color("none")
ax.yaxis.tick_left()
# set the y-spine
ax.spines["bottom"].set_position("zero")
# turn off the top spine/ticks
ax.spines["top"].set_color("none")
ax.xaxis.tick_bottom()
ax.set_xlim(-0.2, 2.0)
ax.set_ylim(-4, 4)
x = np.linspace(-1, 3, 100)
lines = []
lines.append(ax.plot(x, f(x), "k-", label=r"$\cos(x) - x^3$")[0])
lines.append(ax.plot([], [], "k--")[0])
lines.append(ax.plot([], [], "k--")[0])
lines.append(ax.plot([], [], "r--")[0])
lines.append(ax.text([], [], "", fontsize=10))
lines.append(ax.text([], [], "", fontsize=10))
lines.append(ax.text([], [], "", fontsize=10, color="r"))
# ax.legend(loc='upper left');
true_count = 0
def animate(i):
lines[1].set_data([a[i], a[i]], [0.0, f(a[i])])
lines[2].set_data([b[i], b[i]], [0.0, f(b[i])])
lines[3].set_data([p[i], p[i]], [0.0, f(p[i])])
if f(a[i]) > 0:
lines[4].set_y(f(a[i]) + 0.2)
else:
lines[4].set_y(0.2)
if f(b[i]) > 0:
lines[5].set_y(f(b[i]) + 0.2)
else:
lines[5].set_y(0.2)
if p[i] is not None and f(p[i]) > 0:
lines[6].set_y(f(p[i]) + 0.2)
else:
lines[6].set_y(0.2)
if p[i] is not None:
if np.isclose(a[i], p[i]):
lines[4].set_text("")
elif np.isclose(a[i], b[i]):
lines[5].set_text("")
lines[6].set_x(p[i] - 0.05)
lines[6].set_text(p_label[i])
else:
lines[4].set_x(a[i] - 0.05)
lines[5].set_x(b[i] - 0.05)
lines[4].set_text(a_label[i])
lines[5].set_text(b_label[i])
lines[6].set_text("")
return
plt.close("all")
ani1 = FuncAnimation(fig, animate, frames=len(a), interval=1600)
ani1
The bisection method finds a solution to $f(x) = 0$ where $f$ is continuously defined on the interval $[a,b]$ and $f(a)$ and $f(b)$ have opposite signs
| Steps | |
|---|---|
| 1. | Set $i = 1$ |
| 2. | Set $FA = f(a)$ |
| 3. | While $i \leq $ max iterations, do Steps A-F |
| 4. | $\phantom{--}$ Set $p = a+ \frac{(b-a)}{2}$ |
| 5. | $\phantom{--}$ Set $FP = f(p)$ |
| 6. | $\phantom{--}$ If $FP = 0$ or $\frac{(b-a)}{2}$ < TOL, end program, output $p$ as the root. |
| 7. | $\phantom{--}$ If $\mbox{sgn}\left(FA\right)\mbox{sgn}\left(FP\right) > 0$, do steps 8-9 |
| 8. | $\phantom{----}$ $a = p$ |
| 9. | $\phantom{----}$ $FA = FP$ |
| $\phantom{--}$ Else, $b = p$ | |
| 10. | $\phantom{--}$ Set $i = i+1$ |
| 11. | Print "Method failed to converge after 'max iterations'." |
def bisection(f, a, b, max_iterations=10000, tolerence=1e-6):
FA = f(a)
for i in range(max_iterations):
p = a + (b - a) / 2
FP = f(p)
if np.isclose(FP, 0.0) or (b - a) / 2 < tolerence:
return p
if np.sign(FA) * np.sign(FP) > 0:
a = p
FA = FP
else:
b = p
return
Other stopping procedures can be applied at Step 6 in the previous pseudocode. For example, we can select a tolerance of $\epsilon$ and generate $p_1, p_2, \ldots, p_N$ until one of the following conditions is met
The Biesection Method has the advantage that as long as the root is bounded by the interval $[a,b]$, it will always converge. It has the disadvantage that convergence can be very slow and a good intermediate approximation to the root can be inadvertently discarded. This method is most useful when used to get an initial very rough approximation to a root and then combine it with a method that has faster convergence to get a better approximation to the root. We will talk about these other methods in the upcoming sections.
Let's have a look at the convergence rate of this method.
Suppose that $f \in C[a,b] $ and $f(a)\cdot f(b) < 0$. The Bisection Method generates a sequence $\{p_n - p\}_{n=1}^\infty$ approximating a zero $p$ of $f$ with
$$\vert p_n -p \vert \leq \frac{b-a}{2^n},$$when $n \geq 1$.
Proof: For each $n \geq 1$, we have
$$b_n - a_n = \frac{1}{2^{n-1}} \left(b-a\right)$$and $p \in (a_n, b_n)$.
Since $p_n = \frac{1}{2}\left(a_n + b_n\right)$ for all $n \geq 1$, then
$$\vert p_n - p \vert < \frac{1}{2}\left(b_n - a_n\right) = \frac{b-a}{2^n}$$Since,
$$\vert p_n - p \vert \leq \left(b-a\right)\frac{1}{2^n}$$the sequence $\{p_n\}_{n=1}^\infty$ converges to $p$ with rate of convergence $O\left(\frac{1}{2^n}\right)$, i.e.
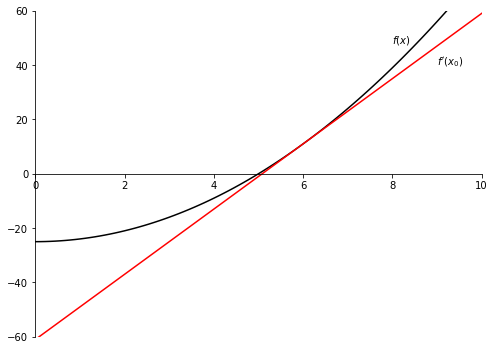
The Newton-Raphson method is most commonly used when a function of a single variable is defined mathematically (not a result of other numerical computations) and the derivative of the function can be easily evaluated. The method approximates a function by it's tangent line at a point to get successively better estimates of the root.
For a function
$f(x) = 0$
The general formula is
An example: One iteration of the function $f(x) = x^2 - 25$ with an initial guess of $x_0 = 6$
f = lambda x: x ** 2.0 - 25
fprime = lambda x: 2 * x
x0 = 6
x0 - f(x0) / fprime(x0)
fig, ax = plt.subplots(figsize=(8, 6))
ax.spines["left"].set_position("zero")
ax.spines["right"].set_color("none")
ax.yaxis.tick_left()
ax.spines["bottom"].set_position("zero")
ax.spines["top"].set_color("none")
ax.xaxis.tick_bottom()
ax.set_xlim(-0.0, 10.0)
ax.set_ylim(-60, 60)
x = np.linspace(-1, 10.0, 100)
ax.plot(x, f(x), "k-")
ax.plot(x, fprime(x0) * (x - x0) + f(x0), "r-")
ax.text(9, 40, r"$f^\prime\left(x_0\right)$")
ax.text(8, 48, r"$f\left(x\right)$")
plt.show()
An animation showing the root of the function $f(x) = \cos(x) - x^3$ converging to a tolerance of 0.001. An initial guess of 0.4 was used.
p = [0.4]
f = lambda x: np.cos(x) - x ** 3 if x is not None else None
fprime = lambda x: -3 * x ** 2 - np.sin(x) if x is not None else None
for i in range(15):
x = p[-1] if p[-1] is not None else p[-2]
xold = x
x = x - f(x) / fprime(x)
p.append(None)
p.append(x)
if np.abs(x - xold) < 1e-4:
break
count = 0
subcount = 0
p_label = []
for _ in range(len(p)):
p_label.append(r"$p_{}$".format(count))
subcount += 1
if subcount == 2:
subcount = 0
count += 1
fig, ax = plt.subplots(figsize=(8, 6))
ax.spines["left"].set_position("zero")
ax.spines["right"].set_color("none")
ax.yaxis.tick_left()
ax.spines["bottom"].set_position("zero")
ax.spines["top"].set_color("none")
ax.xaxis.tick_bottom()
ax.set_xlim(-0.2, 2.0)
ax.set_ylim(-4, 4)
x = np.linspace(-1, 3, 100)
lines = []
lines.append(ax.plot(x, f(x), "k-", label=r"$\cos(x) - x^3$")[0])
lines.append(ax.plot([], [], "k--")[0])
lines.append(ax.plot([], [], "r-")[0])
lines.append(ax.text([], [], "", fontsize=10))
def animate(i):
lines[1].set_data([p[i], p[i]], [0.0, f(p[i])])
if p[i] is None:
lines[2].set_data(x, fprime(p[i - 1]) * (x - p[i - 1]) + f(p[i - 1]))
lines[3].set_text("")
if p[i] is not None:
if f(p[i]) > 0:
lines[3].set_y(f(p[i]) + 0.2)
lines[3].set_x(p[i] - 0.05)
lines[3].set_text(p_label[i])
else:
lines[3].set_y(f(p[i]) - 0.2)
lines[3].set_x(p[i] - 0.05)
lines[3].set_text(p_label[i])
return
plt.close("all")
ani2 = FuncAnimation(fig, animate, frames=len(p), interval=1600)
ani2
Pseudocode for Newton's Method.
To find a solution to $f(x) = 0$ given an initial guess $p_0$
| Steps | |
|---|---|
| 1. | Set $i = 1$ |
| 2. | While $i \leq $max iterations, do Steps 3-6 |
| 3. | $\phantom{--}$ Set $p=p_0 - f(p_0)/f'(p_0)$ |
| 4. | $\phantom{--}$ If $\vert p - p_0 \vert < TOL$, end program and out $p$ as approximate root |
| 5. | $\phantom{--}$ Set $i = i + 1$ |
| 6. | $\phantom{--}$ Set $p_0 = p$ |
| 7. | Print "Method failed to converge after 'max iterations'." |
def newton_zero(f, fp, x0, max_iterations=10000, tolerence=1e-10):
x = x0
for i in range(max_iterations):
xold = x
x = x - f(x) / fp(x)
if np.abs(x - xold) < tolerence:
return x
Assume that Newton's $x_{k+1}$ iteration converges to $x^{\star}$ with $f(x^{\star}) \neq 0$. If we define
$x_k = x^\star + \epsilon_k$
and take the Taylor series expansion about $x^\star$ we have
or, rearranging
But,
The last equation implies that Newton's method converges quadratically. That is, near a root, the number of significant digits approximately doubles with each step. This is a very strong convergence property and makes Newton's method the root finding method of choice for any function whose derivative can be evaluated efficiently and is continuous near the root.
In the last section we discussed Newton's method for root finding. We said that although Newton's method has some very strong convergence properties, one disadvantage is the need to evaluate $f'(x)$, which can sometimes be messy. In order to circumvent this derivative calculation we introduce a slight variation. Recall, that by definition
This technique is called the secant method. Here we need two initial approximations $x_0$ and $x_1$, although they do not need to be bound by the root.
def secant_zero_animate(p0, p1):
f = lambda x: np.cos(x) - x ** 3 if x is not None else None
p0 = [p0]
p1 = [p1]
pnew = [None]
q0 = f(p0[-1])
q1 = f(p1[-1])
for _ in range(100):
if p1 is not None and p0 is not None:
p = p1[-1] - q1 * (p1[-1] - p0[-1]) / (q1 - q0)
if np.abs(p - p1[-1]) < 0.05:
break
p0.append(None)
p1.append(None)
if p0[-1] is not None:
p0.append(p1[-1])
else:
p0.append(p1[-2])
p1.append(p)
q0 = q1
q1 = f(p)
pnew.append(p)
pnew.append(None)
count = 0
subcount = 0
p0_label = []
p1_label = []
pnew_label = []
for _ in range(len(p0)):
p0_label.append(r"$p_{}$".format(count))
p1_label.append(r"$p_{}$".format(count + 1))
pnew_label.append(r"$p_{}$".format(count + 2))
subcount += 1
if subcount == 2:
subcount = 0
count += 1
fig, ax = plt.subplots(figsize=(8, 6))
ax.spines["left"].set_position("zero")
ax.spines["right"].set_color("none")
ax.yaxis.tick_left()
ax.spines["bottom"].set_position("zero")
ax.spines["top"].set_color("none")
ax.xaxis.tick_bottom()
ax.set_xlim(-0.2, 2.0)
ax.set_ylim(-4, 4)
x = np.linspace(-1, 3, 100)
lines = []
lines.append(ax.plot(x, f(x), "k-", label=r"$\cos(x) - x^3$")[0])
lines.append(ax.plot([], [], "r--")[0])
lines.append(ax.plot([], [], "k--")[0])
lines.append(ax.plot([], [], "k--")[0])
lines.append(ax.plot([], [], "r-")[0])
lines.append(ax.text([], [], "", fontsize=10))
lines.append(ax.text([], [], "", fontsize=10))
lines.append(ax.text([], [], "", fontsize=10, color="r"))
def animate(i):
if p0[i] is not None:
lines[2].set_data([p0[i], p0[i]], [0.0, f(p0[i])])
lines[3].set_data([p1[i], p1[i]], [0.0, f(p1[i])])
if f(p0[i]) > 0:
lines[5].set_y(f(p0[i]) + 0.2)
else:
lines[5].set_y(f(p0[i]) - 0.2)
if f(p1[i]) > 0:
lines[6].set_y(f(p1[i]) + 0.2)
else:
lines[6].set_y(f(p1[i]) - 0.2)
lines[5].set_x(p0[i] - 0.05)
lines[5].set_text(p0_label[i])
lines[6].set_x(p1[i] - 0.05)
lines[6].set_text(p1_label[i])
lines[7].set_text("")
else:
lines[1].set_data([pnew[i], pnew[i]], [0.0, f(pnew[i])])
if f(pnew[i]) > 0:
lines[7].set_y(f(pnew[i]) + 0.2)
else:
lines[7].set_y(f(pnew[i]) - 0.2)
lines[7].set_x(pnew[i] - 0.05)
lines[7].set_text(pnew_label[i])
if p0[i] is not None:
lines[4].set_data(
x, (f(p1[i]) - f(p0[i])) / (p1[i] - p0[i]) * (x - p1[i]) + f(p1[i])
)
return
plt.close("all")
return FuncAnimation(fig, animate, frames=len(pnew), interval=1600)
secant_zero_animate(0.1, 1.4)
This is another simulation for the same problem, but this time the initial guesses are 1.2 and 1.4. This demonstrates that the secant method guesses do not have to be bound by the root.
secant_zero_animate(1.2, 1.4)
Pseudocode for Secant Method
To find a solution to $f(x) = 0$ given initial guesses of $p_0$ and $p_1$:
| Steps | |
|---|---|
| 1. | Set $i = 2$ |
| 2. | Set $q_0 = f(p_0)$ |
| 3. | Set $q_1 = f(p_1)$ |
| 4. | While $i \leq$ max iterations, do Steps 5-12 |
| 5. | $\phantom{--}$ Set $p = p_1 - q_1(p_1 - p_0) / (q_1 - q_0)$ |
| 6. | $\phantom{--}$ If $\vert p - p_1 \vert < TOL$, end program and out $p$ as approximate root. |
| 7. | $\phantom{--}$ Set $i = i+1$ |
| 8. | $\phantom{--}$ Set $p_0 = p_1$ |
| 9. | $\phantom{--}$ Set $q_0 = q_1$ |
| 10. | $\phantom{--}$ Set $p_1 = p$ |
| 11. | $\phantom{--}$ Set $q_1 = f(p)$ |
| 12. | $\phantom{--}$ Set $i = i + 1$ |
| 13. | Print "Method failed to converge after 'max iterations'." |
def secant_zero(f, p0, p1, max_iterations=10000, tolerence=1e-10):
q0 = f(p0)
q1 = f(p1)
for _ in range(max_iterations):
p = p1 - q1 * (p1 - p0) / (q1 - q0)
if np.abs(p - p1) < tolerence:
return p
p0 = p1
q0 = q1
p1 = p
q1 = f(p)
return
This means that the error follows the following relationship:
$$ \lim_{k\rightarrow \infty} |\epsilon_{k+1}| \approx \mbox{constant} \times |\epsilon_k|^\alpha $$The secant method has the disadvantage that the root does not necessarily remain bracketed. For functions that are not sufficiently continuous, the algorithm is not guaranteed to converge. Local behavior might send it off toward infinity. There is a slight modification to the secant method called the false position method that will keep the root bracketed and therefore guarantee convergence, but at a slower rate. A better method to guarantee convergence would be to combine the secant method with the bisection method, therefore we will not discuss the false position method.
Hybrid methods simply combine two or more root finding methods to create a robust algorithm. For example, Brent's Method uses the Bisection Method to get near the root, then the Secant Method is used to polish it off for faster convergence.